

What Makes a Robot Trustworthy?
The factory floor doesn't forgive approximations
When a robot arm places a PCB connector, welds a chassis joint, or sorts pharmaceutical blister packs, the allowable margin for error can be smaller than the width of a human hair. Yet most conversations about robotics focus on payload, reach, or speed—the headline numbers.
The true indicators of trustworthiness are reflected in the finer details of product capabilities. Accuracy, precision, repeatability, reproducibility, and adaptability determine whether a robot becomes a productive asset or a line-stopping liability. These five metrics are distinct. They measure different aspects of performance. Confusing them leads to deploying the wrong robot for the wrong task.
"A robot that is fast but imprecise is not an asset. It is a liability with a warranty."
Five metrics, five failure modes
Precision
Accuracy
Repeatability
Reproducibility
Adaptability
Note: Adaptability is a broad and evolving subject, and will be explored in detail in a future white paper.
What ±0.02 mm actually looks like
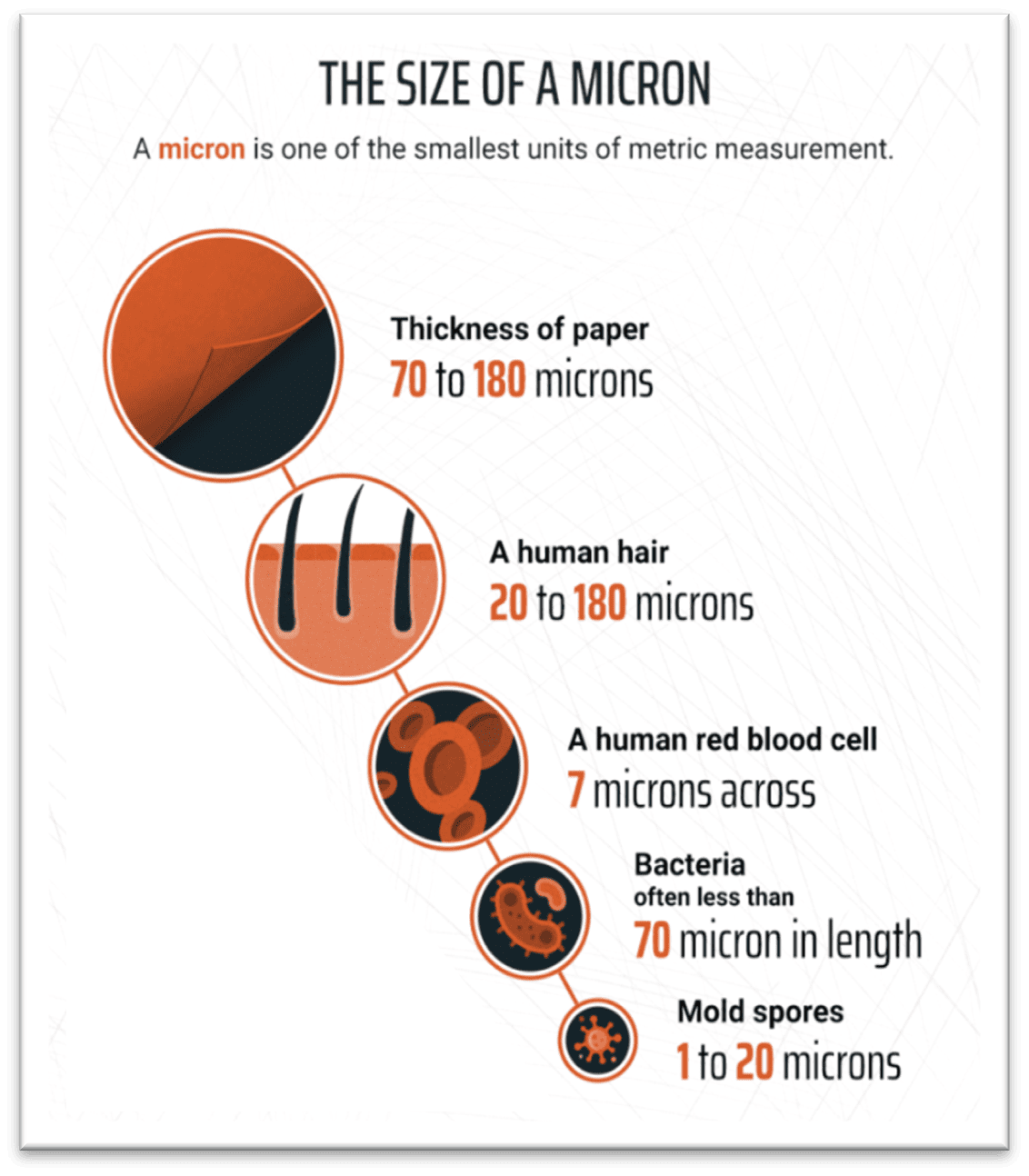
Repeatability specs are quoted in millimetres or microns, but those numbers remain abstract until you see them in context. The Svaya SR-L series achieves ±0.02 mm repeatability-that’s 20 microns, or roughly half the width of a human hair.
To put this in perspective: at that repeatability level, the robot can reliably perform tasks that require sub-millimetre placement, such as PCB component insertion, connector alignment, and medical device assembly. Below this threshold, tasks move into the “human judgment required” category. Above it, you enter specialty electronics and semiconductor territory.
The hardware that makes precision possible
- Zero-backlash transmission is therefore critical for repeatability and reproducibility. Backlash produces unpredictable position inaccuracies which affect the repeatability of the motion. These cannot even be compensated with control systems. Eliminating backlash ensures that every commanded motion results in immediate and predictable physical response. Precision gearboxes, smooth torque output with minimal ripple, and low hysteresis ensure that motion is both controlled and consistent.
- Rigid structures and tightly integrated links ensure that the mechanical system behaves as a stable foundation. Structural members are designed with high stiffness to minimize deflection under load, while joint interfaces are machined to tight tolerances, reducing unintended movement at connection points. Developing mechanisms to remove all play between the links and joints is absolutely essential to having the most effective mechanical system for repeatable motion.
Absolute Position Sensing at Every Joint
A robot’s ability to achieve precision depends on how accurately it can measure its own state.
Relative encoders measure incremental motion; they only track how far a joint has moved from a reference position. Any loss of that reference, such as during a power cycle, requires re-homing and introduces uncertainty.
Absolute encoders eliminate this limitation. They always provide the exact joint position, including immediately after power-up, ensuring continuity and reliability in operation. However, just having an absolute encoder doesn’t ensure high repeatability. The resolution and accuracy of the encoders themselves must be high to ensure high repeatability and reproducibility.
Such high-resolution absolute encoders allow the control system to detect even the smallest deviations in motion and correct them in real time. Without accurate sensing, even the most sophisticated control algorithms operate blindly. The encoder is the robot’s proprioceptor—its moment-to-moment awareness of its own position. If that signal is noisy or low-resolution, disturbances accumulate into errors before they can be detected and corrected.
Real-Time Control Systems
Hardware establishes the foundation of precision, but control systems enforce it.
The robot’s control loop continuously recomputes position, velocity, and torque commands at each joint, typically at frequencies on the order of 1000 Hz. At this rate, the system can detect and correct disturbances, such as load variations, external forces, or dynamic effects, before they become visible at the task level.
Tight feedback loops with well-maintained timings, combined with well-tuned control strategies such as PID-based regulation, enable:
- Rapid and consistent error correction
- Stable system response without oscillation
- Minimal following error during motion execution
Accurate trajectory tracking ensures smooth and predictable motion, even under varying loads or external disturbances. This not only improves precision but also reduces the risk of mechanical stress, misalignment, and long-term wear.
At Svaya, we have engineered our control systems to have minimal error residues (±2 encoder counts). This ensures that the robot’s repeatability from control systems is always under ±20 microns. Our software and controls engineering ensures the timing and loop rates required for this are maintained across different operating conditions, including changes in load and temperature.
Real-Time Control Systems
Hardware establishes the foundation of precision, but control systems enforce it.
The robot’s control loop continuously recomputes position, velocity, and torque commands at each joint, typically at frequencies on the order of 1000 Hz. At this rate, the system can detect and correct disturbances, such as load variations, external forces, or dynamic effects, before they become visible at the task level.
Tight feedback loops with well-maintained timings, combined with well-tuned control strategies such as PID-based regulation, enable:
- Rapid and consistent error correction
- Stable system response without oscillation
- Minimal following error during motion execution
Accurate trajectory tracking ensures smooth and predictable motion, even under varying loads or external disturbances. This not only improves precision but also reduces the risk of mechanical stress, misalignment, and long-term wear.
At Svaya, we have engineered our control systems to have minimal error residues (±2 encoder counts). This ensures that the robot’s repeatability from control systems is always under ±20 microns. Our software and controls engineering ensures the timing and loop rates required for this are maintained across different operating conditions, including changes in load and temperature.
Repeatability test videos & results
Video showing the repeatability testing process for Svaya SR-L6 robot and measurement values using a laser sensor.
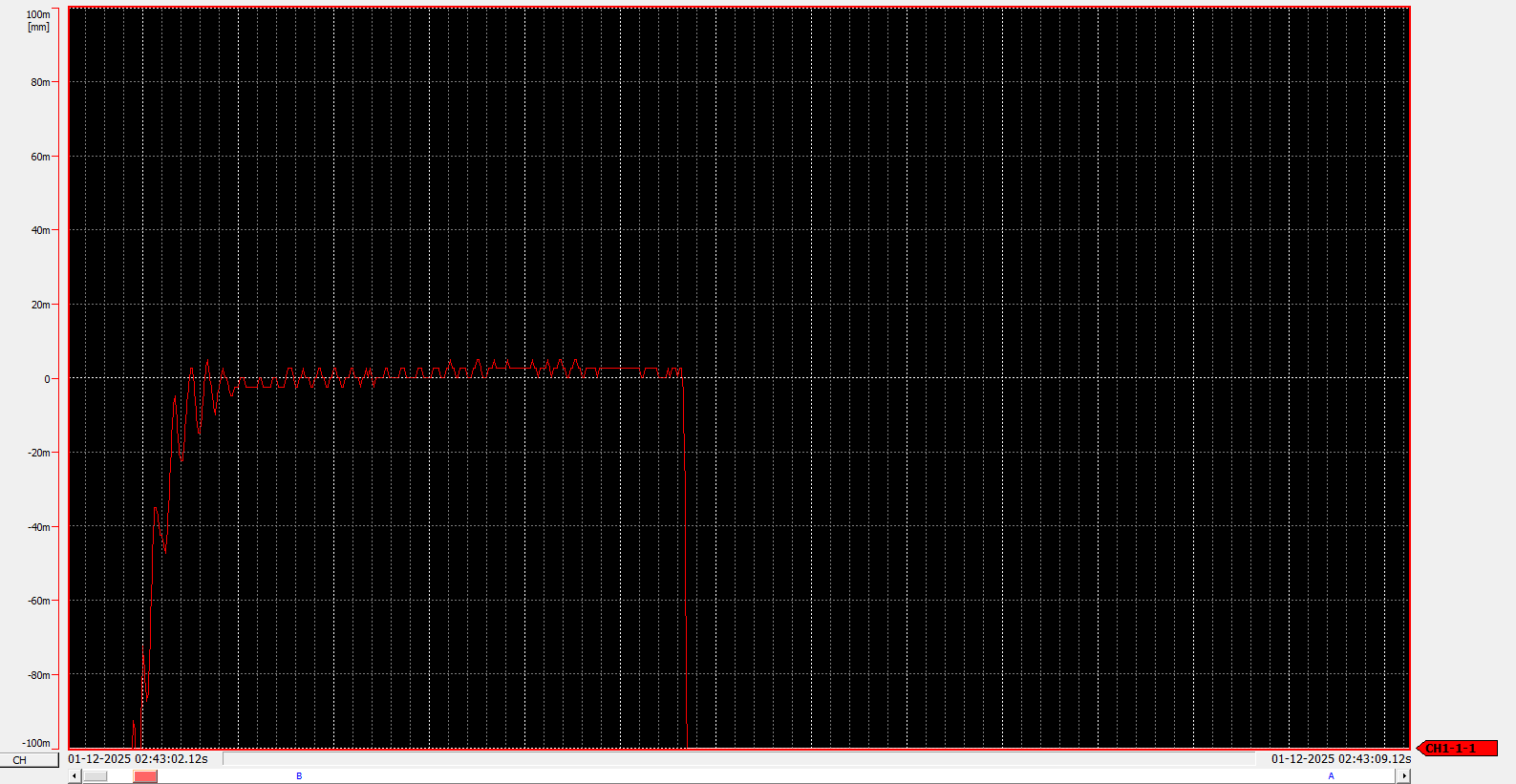
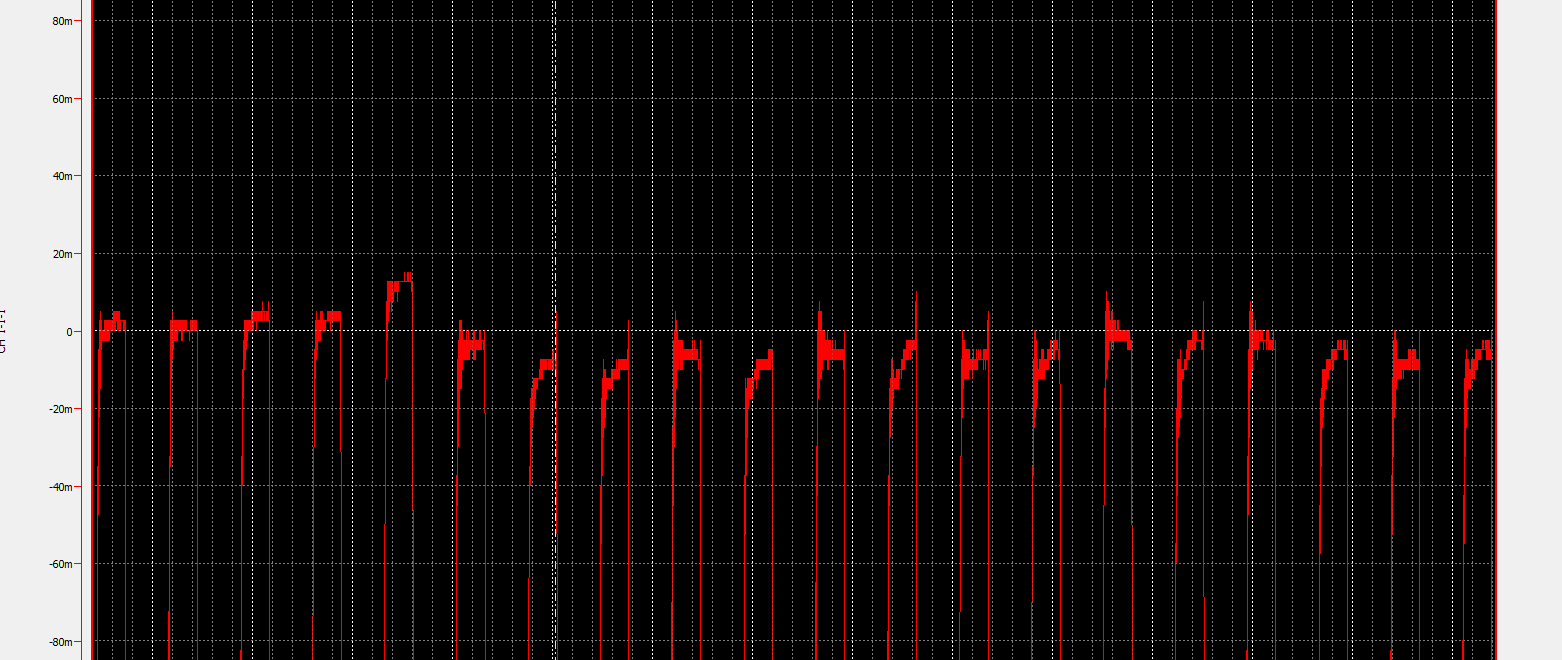
Figure 2: Magnified view of Figure 1, highlighting fine-scale performance where the Svaya SR-L6 maintains positioning precision within ±2 microns.
Trust is earned through precision
A robot becomes production line ready when metrics like accuracy, precision, repeatability, reproducibility, and adaptability are all within the specification simultaneously. Violation in any one of these metrics has downstream affects on customer’s deployment. At Svaya we know the importance of customer’s trust and our vertically integrated stack serves the cause.
The result is a robot that earns its place on the production line. Not as a novelty, but as a reliable asset that improves yield, reduces rework, and gives operators confidence in its output.